Minseok Kim
Ph.D. Candidate @ VILAB, KAIST

Hello! I am a 2nd-year Ph.D. student in VILAB, led by Prof. Kuk-Jin Yoon in the Department of Mechanical Engineering at KAIST.
Building upon my foundational background in robust 3D perception (LiDAR/Radar) and data-efficient learning (Category Discovery & Dataset Distillation), my current research vision is deeply focused on understanding human intention in egocentric scenarios. I am actively exploring how these insights can advance egocentric video understanding and shape next-generation AR/VR technologies.
I am always open to discussions on computer vision, egocentric vision, human behavior understanding, and related topics. Feel free to reach out by email.
News
| May 13, 2026 | Personal webpage is now live! |
|---|
Education
2025.03 – now · Ph.D. candidate, Mechanical Engineering, KAIST
2023.03 – 2025.02 · M.S., Mechanical Engineering, KAIST
2017.03 – 2023.02 · B.S., Mechanical Engineering, Hanyang University
Publications
- Solving LiDAR Inverse Problems using LiDAR Diffusion Models2026Preprint
- PointDPS: Diffusion Posterior Sampling for Point Inverse Problems2026Preprint
- Zero-Shot Coordination under Partial Observability by Predicting Intention of Partner2026Preprint
- Gaze-hand Trajectory Merging for Efficient Egocentric Video Understanding2026Preprint
-
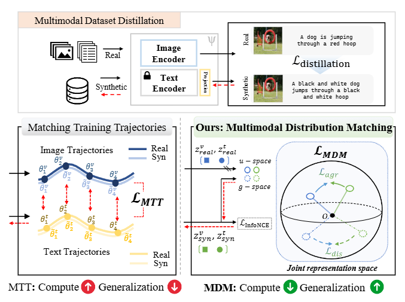 Multimodal Distribution Matching for Vision-Language Dataset DistillationIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026
Multimodal Distribution Matching for Vision-Language Dataset DistillationIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026 -
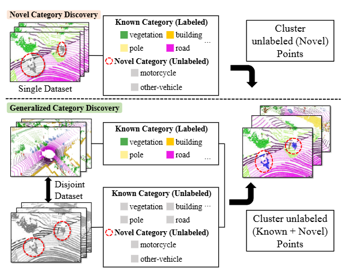 Generalized Category Discovery for LiDAR Semantic SegmentationIn Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2026
Generalized Category Discovery for LiDAR Semantic SegmentationIn Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2026 -
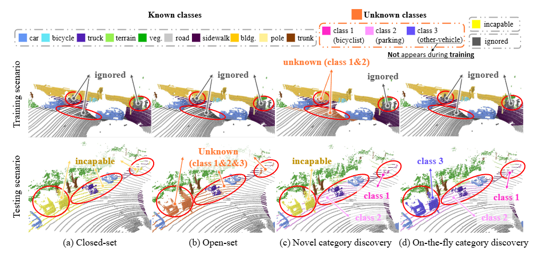 On-the-fly Category Discovery for LiDAR Semantic SegmentationIn European Conference on Computer Vision, 2024
On-the-fly Category Discovery for LiDAR Semantic SegmentationIn European Conference on Computer Vision, 2024 -
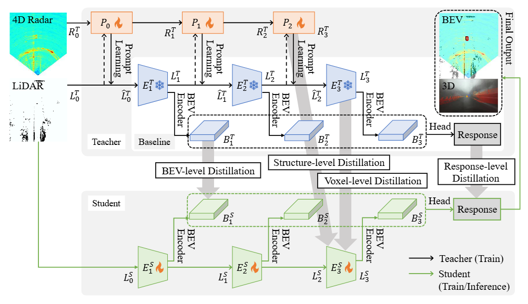 LiDAR-based All-weather 3D Object Detection via Prompting and Distilling 4D RadarIn European Conference on Computer Vision, 2024
LiDAR-based All-weather 3D Object Detection via Prompting and Distilling 4D RadarIn European Conference on Computer Vision, 2024
Projects
- Development of Mobility and Connectivity Platform for Unmanned Autonomous Delivery
- Development of quadrupedal robot system technology for surveillance, reconnaissance, and search missions